
 Každý si nájde ako tráviť voľný čas. Ja som chcel skúsiť aké to je lietať. Podľa slov manželky „nachodíš sa pri lietaní viac ako pri golfe“ je jasné že patrím do kategórie lepičov a hľadačov. Veď hneď prvý dron za 50,-€ mi uletel. Našiel som ho po troch dňoch. Vznikla potreba hľadania trocha ináč. Vďaka Mirovi_M som si kúpil Tx s telemetriou, a na stránke www.rcmodelytt.sk je návod ako postaviť senzor.
Každý si nájde ako tráviť voľný čas. Ja som chcel skúsiť aké to je lietať. Podľa slov manželky „nachodíš sa pri lietaní viac ako pri golfe“ je jasné že patrím do kategórie lepičov a hľadačov. Veď hneď prvý dron za 50,-€ mi uletel. Našiel som ho po troch dňoch. Vznikla potreba hľadania trocha ináč. Vďaka Mirovi_M som si kúpil Tx s telemetriou, a na stránke www.rcmodelytt.sk je návod ako postaviť senzor.
A doba sa mení na „s GPS nájdem miesto pádu“. Aj keď v repke ani GPS nestačí, ale bzučiak áno. Ostáva vyriešiť pádovú rýchlosť. Viem chce to prax. Dosť pomalé neisté ale pri tom dlho nelietam pretože lepím. Na stránkach rcmodely.cevaro.sk je popis ako merať rýchlosť oproti vetru. Používajú snímač MPXV5004GP len končia poznámkou, že to je vhodné pre vysoké rýchlosti, čo ale nie pádová rýchlosť. Presnejšie píšu „Krátko povedané, čím rýchlejšie, tým presnejšie“ .
V niektorých plynových kotloch je na riadenie pomeru plyn – vzduch riešené na základe snímača podobného D6F-PH0505AD3. Tento som použil pri pokuse postaviť si merák na ±5Pa. Senzor je ale veľký a do lietadla sa nehodí. Strýko Google ale našiel stránku https://openrcforums.com/forum/viewtopic.php?t=12629 a hlavne poznámky od užívateľa „Tempo“ a bolo svetlo na konci tunela.
Senzor SDP32 ± 120Pa čo v podstate je snímanie rýchlosti od 0 do cca 50km/h. Pri vyššej rýchlosti sa senzoru nestane nič ukáže maximum. Snímač je „jednoduchý“ keďže nemá nič pohyblivé. Na stránke je poznámka , že senzor je tak malý, že sa dá osadiť na mieste merania a miesto hadičiek potiahnuť tenký drôtik, čo výrazne uľahči montáž. Aj keď uvažujú osadenie na konci Pitotovej trubici https://openrcforums.com/forum/download/file.php?id=19472&sid=3ec3858ae05945479a7d183c21bc061c&mode=view
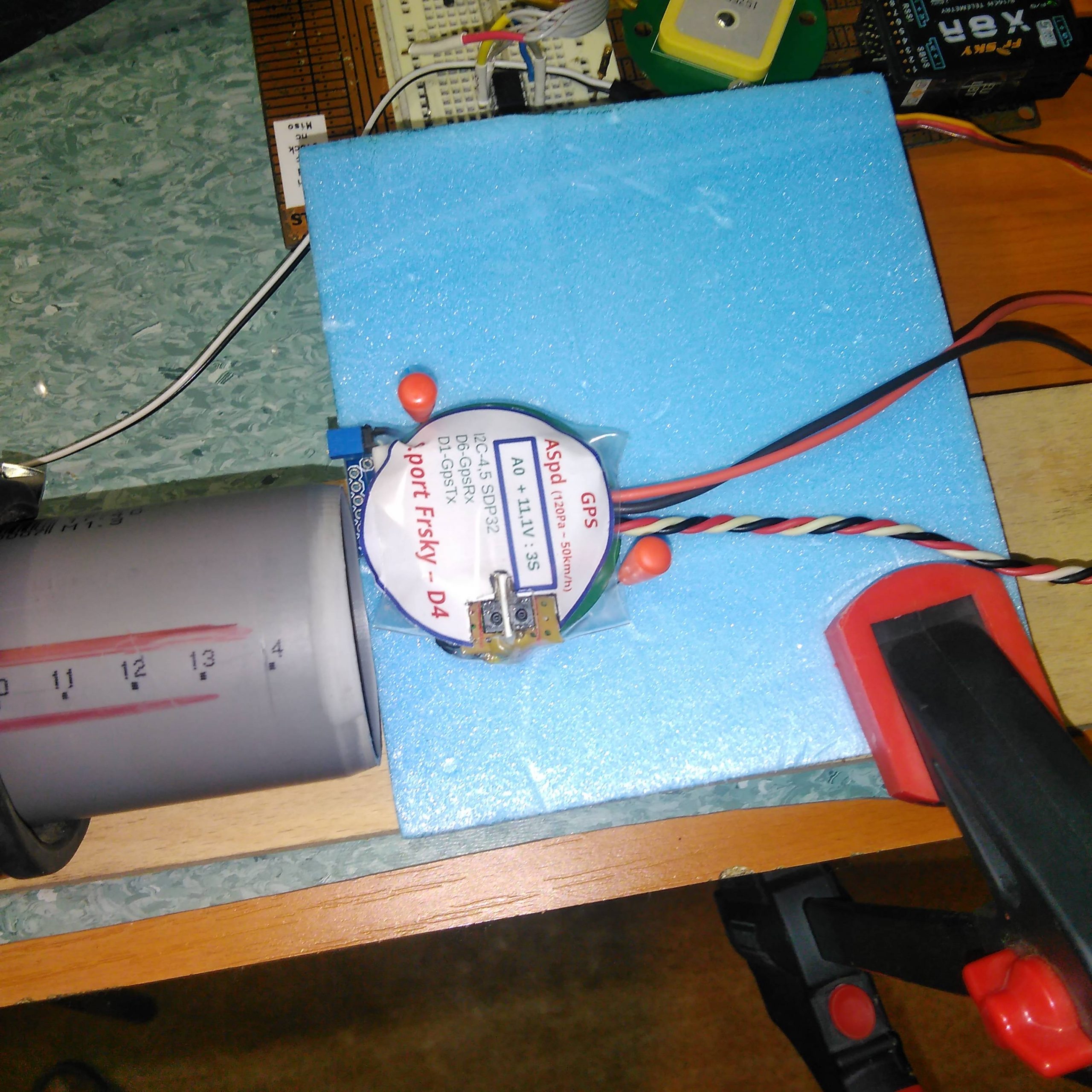
Manuálové stránky výrobcu https://www.sensirion.com/en/flow-sensors/differential-pressure-sensors/airspeed-sensor-revolutionizes-workflow-with-px4-vtol-drones/ okrem iného odporúčajú aj priame meranie pomocou clonky. Tak vznikol pokus senzor osadiť k GPS anténe.
 GPS modul dávam na miesto kde anténe nič nezavadia a tak rýchlosť bude merať správne. To ukáže prax.
GPS modul dávam na miesto kde anténe nič nezavadia a tak rýchlosť bude merať správne. To ukáže prax.
 No a zvyšok už je ľahký. V čase „Control Cudzie – Control Vlastné“ a strýca Google stačilo prehľadať SDP32 & lietadlo a vrátiť sa k openXsenzor kde skúsenejší stihli implementovať podporu SDP32. Takže vlastne len pripojiť zopár drôtikov – toto bolo najťažšie keďže senzor je skutočne malý a po trápnom pokuse výroby pitot trubice som skúsil clonku. Moja „skúšobná testovacia stolica“ …
No a zvyšok už je ľahký. V čase „Control Cudzie – Control Vlastné“ a strýca Google stačilo prehľadať SDP32 & lietadlo a vrátiť sa k openXsenzor kde skúsenejší stihli implementovať podporu SDP32. Takže vlastne len pripojiť zopár drôtikov – toto bolo najťažšie keďže senzor je skutočne malý a po trápnom pokuse výroby pitot trubice som skúsil clonku. Moja „skúšobná testovacia stolica“ …
 … ukázala ono to funguje!
… ukázala ono to funguje!

 Jediné čo je skutočne dôležité je :
Jediné čo je skutočne dôležité je :
- snímač orientovaný presne v smere letu (clonka kolmo na let),
- pred vstupom do senzoru žiadna prekážka,
- výška clonky aspoň 6mm.
Čím vyššia tým presnejšie meranie. (trojnásobok priemeru otvoru stačí). Po vložení poskladaného snímača do fólie som zistil, že požiadavka prekážok pred senzorom je klúčová. Prekážka pred vstupom do senzoru dokáže úplne znížiť až znemožniť meranie. Stačila zle odrezaná fólia malý otvor a bolo po meraní. Ale to som nožíkom upravil.
 Ostáva už len overiť v praxi pár pádov ako sa zachová clonka. To nejaký piatok potrvá. Časom chcem skúsiť dať vytlačiť jednoduchý hranol s dvoma kanálikmi , jeden s kolenom dopredu a druhý rovno hore. Potom porovnám odolnosť a presnosť clonky oproti vodiacim kanálikom.
Ostáva už len overiť v praxi pár pádov ako sa zachová clonka. To nejaký piatok potrvá. Časom chcem skúsiť dať vytlačiť jednoduchý hranol s dvoma kanálikmi , jeden s kolenom dopredu a druhý rovno hore. Potom porovnám odolnosť a presnosť clonky oproti vodiacim kanálikom.
Článkom si nerobím nárok na úplnosť, chcel som popísať, že sa to dá jednoducho a rýchlo.
Autor: Mirovoj